Major Project History
Note: Click on the link in each project to get more information
1994: One of five mechanical team members to originate and develop a first generation robotic ocean pipeline welder incorporating two 6’ diameter rotation rings; each ring carrying three, 2.5-axis weld heads, a total of 14 axis of motion. The original system is still in use today.
1996: 6’diameter 1000lbs 5-Axis nuclear spent fuel canister welding robot (Vectra NUHOMS welder). Was one of two mechanical team members to concept the system that grew to a 6 member team to finish. First build successfully used in the field and when on to enjoy several orders over the coming years until the design was sold.
1997:
Secondary
Pollish table, cassette indexer and frame design
for silicon wafer plannerization machine (Speedfam Auriga). I
was one of a three member mechanical team.
1998:
Second
generation of the ’94 ocean pipeline welding system above, also still in
use. I was one of 6 mechanical team
members.
1999:
Wrist
movement end-effector for RTZ robot used in a
silicon wafer processing wet bench.
2000: Robotic riveter designed for use on airborne structures. I was one of eight mechanical team members. Quoted from a performance review, “Jon was one of the most significant contributors to this very complex system".
2000: Concept of on-the-fly transfer of an optical fiber web at 45meters per second for optical fiber winding and transfer machines. Contributed the concept of a low impact on-the-fly transfer of optical fiber from one spool to another that resulted in a patent. This is the critically important idea now being used successfully in currently produced machines.
2000: As the only mechanical team member, together with control hardware engineers, an industrial designer, and input from marketing and design reviews, concept, prototype, develop and mfg-transfer of the first production versions of a compact commercial enclosure (BXi) for an 8 channel servo motion and I/O controller with integrated amplifiers for uptime-critical applications in noisy environments – as of 2015 still currently in production - now called the MOOG BX-300. Nearly the entire enclosure consisted of a custom large-die aluminum extrusion to sink large amounts of thermal energy from 6 integrated high-power amplifiers. No prior concept existed. Worked with outside contractor concurrently developing a new custom connector system that integrated power, encoder feedback & IO in one cable.
2001: End-effector for a 300mm silicon wafer foup buffer gantry.
2001: Assorted frame and cover work for several large silicon wafer processing machines. Mostly front ends and buffers for wet benches and planerization equipment.
2001: Optical fiber spool loading arms for a high speed fiber winding and transfer machine. This was the prototype version of a machine referenced bellow. I was one of three mechanical team members.
2002: Concept, design and development of a non-contact unwind follower mechanism that resulted in a patent. This is the critically important idea now being used successfully in currently produced machines.
2002: High running accuracy, high speed spindle improvement of existing optical fiber winding machines in the field.
2002: Development of very low mass, high speed, low drag sheave assembly for line of optical fiber winding machines.
2002: Non-contact follower (patent listed above) and impact resistant doors for hi speed, large capacity optical fiber winding machines currently being manufactured.
2002: Development of near-zero tension distributor for optical fiber winding machines.
2003: MEMS (Micro Electro-Mechanical Systems) mirror gimbal test bench.
2003: Convert cold wire TIG canister welding robot above to hot-wire TIG.
2003: Further development and design maintenance of the BX motion controller enclosure mentioned above (in 2000:).
2003:
Develop and prototype a retrofit to
imaging systems Siemens Medical ONCOR™ Linear
Accelerators to be controlled by the compact BXi
controllers (now sold by MOOG) (see above).
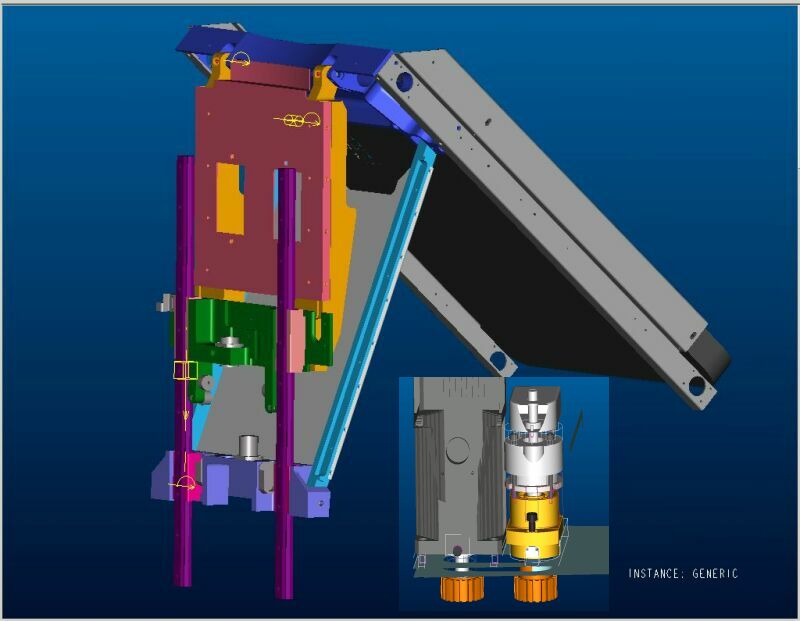
2004:
Design, develop, specify and assemble prototype drive
train retrofit of a flat panel imager for Siemens Medical ONCOR™
Linear Accelerator.
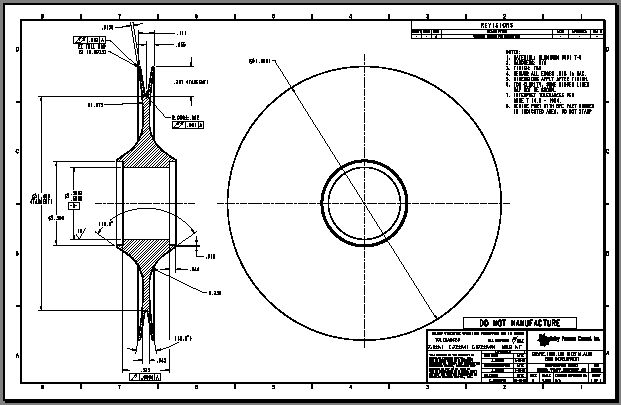
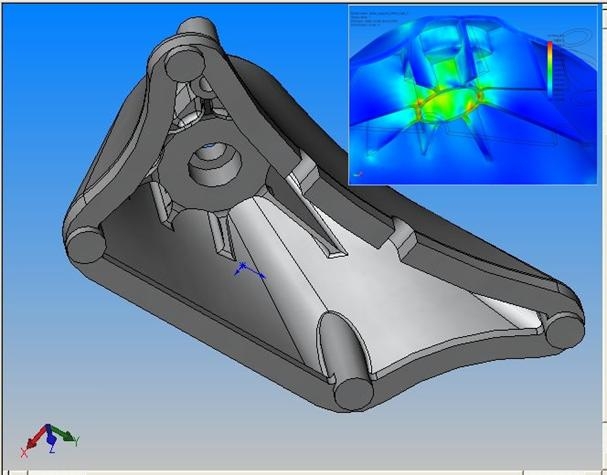
2004-2006:
Part of 8 member team to develop human lower extremity enhancing and
amplification systems in a government funded R&D lab. Designed a high pressure composite hydraulic actuator
consisting of carbon fiber and hardened super alloys employing a unique design
to decrease size and mass with increased static moment handling capacity,
resistance to buckling and overall ruggedness. Small cross section seals
made of a carbon polytetrafluoroethylene blend with a metallic energizer where
developed out of a close working relationship with a specialty manufacturer
resulting in successfully meeting a challenging design goal of very low viscous
and static friction. Worked closely
with high tech vender in high temperature joining of extremely close tolerance
components made of dissimilar metals without steady state distortion. Interesting work on a thin wall cast titanium component using Cosmos FEA. Component
transfers near material limit loads through it’s .050” thick
titanium walls keeping it small and light weight.
2006:
Upgrades and retrofits to a Perkin Elmer 4410 physical vapor deposition system
for the development of MEMS. (microassembly.com)
2007:
Develop a variation on the press mechanism for a Powis
Parker preproduction desktop book binding machine before introduction
deadline – working alone on a design started by an executive of the company.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}